
A capsule microrobot is a very small, pill-shaped machine designed to swim inside the complex liquids of the human body. Medical doctors use these amazing tiny devices to deliver targeted medicine exactly to a sick organ or to take pictures safely inside the stomach. However, building and testing these tiny machines in real human blood or thick intestinal mucus is extremely difficult and highly dangerous. Therefore, to solve this problem safely, smart designers use a powerful Capsule Microrobot In Biomedical CFD Simulation.
By running this computational representation, engineers can see exactly how the surrounding biological fluid pushes and rubs against the robot as it spins forward. This highly accurate Capsule Microrobot CFD analysis helps designers perfectly change the size and the twisting shape of the machine so it moves easily inside narrow human blood vessels. To learn more about how engineering software tests complex fluid movement inside the human body, please explore our comprehensive Biomedical tutorials. Practicing this tutorial project allows engineers to calculate all the invisible forces safely, guaranteeing the medical device is completely ready for human use.
- Reference [1]: Wang, Zixu, et al. “Selective motion control of a novel magnetic-driven minirobot with targeted drug sustained-release function.” IEEE/ASME Transactions on Mechatronics1 (2021): 336-347.
- Reference [2]: Fu, Qiang, et al. “A magnetically capsule robot for biomedical application.” Applied Bionics and Biomechanics1 (2022): 2233417.
- Reference [3]: Cai, Zhuocong, et al. “Characteristic analysis of a magnetically actuated capsule microrobot in medical applications.” IEEE Transactions on Instrumentation and Measurement71 (2021): 1-11.
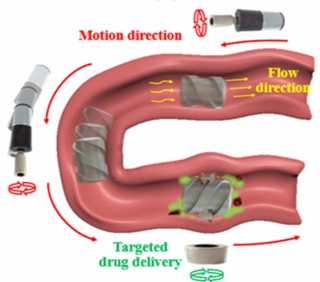
Figure 1: Schematic diagram of the microrobot system, showing the basic physical design of the medical capsule device before simulation.
Simulation Process: 3D Geometry Meshing and MRF Setup in ANSYS Fluent
For this medical project, we built a highly accurate 3D geometry of the microrobot system. We separated this geometry into two specific parts: a rotating zone containing the central capsule body and its helical screw fins, and a stationary outer zone representing the biological intestinal channel. Inside the Fluent Meshing tool, we divided the biological liquid space into exactly 1,195,057 polyhedral cells. We successfully chose polyhedral cells because they calculate the complex, sharp curved surfaces of the helical fins much more accurately than standard tetrahedral mesh types.
To mathematically make the robot swim without using a highly expensive transient moving mesh, we activated the Moving Reference Frame (MRF) method inside ANSYS Fluent. This smart MRF tool keeps the geometric mesh stationary but correctly adds rotational physics to the fluid. We set the MRF rotational velocity to exactly 191 RPM, perfectly matching the real target speed of the medical device.
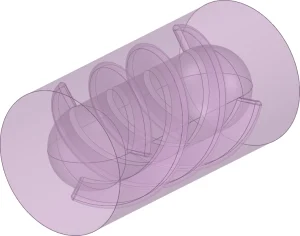
Figure 2: Geometry model of the rotating domain, displaying the 3D representation of the central body and the twisting helical fins.
Post-processing: Analysis of Velocity Contours and Helical Thrust Generation
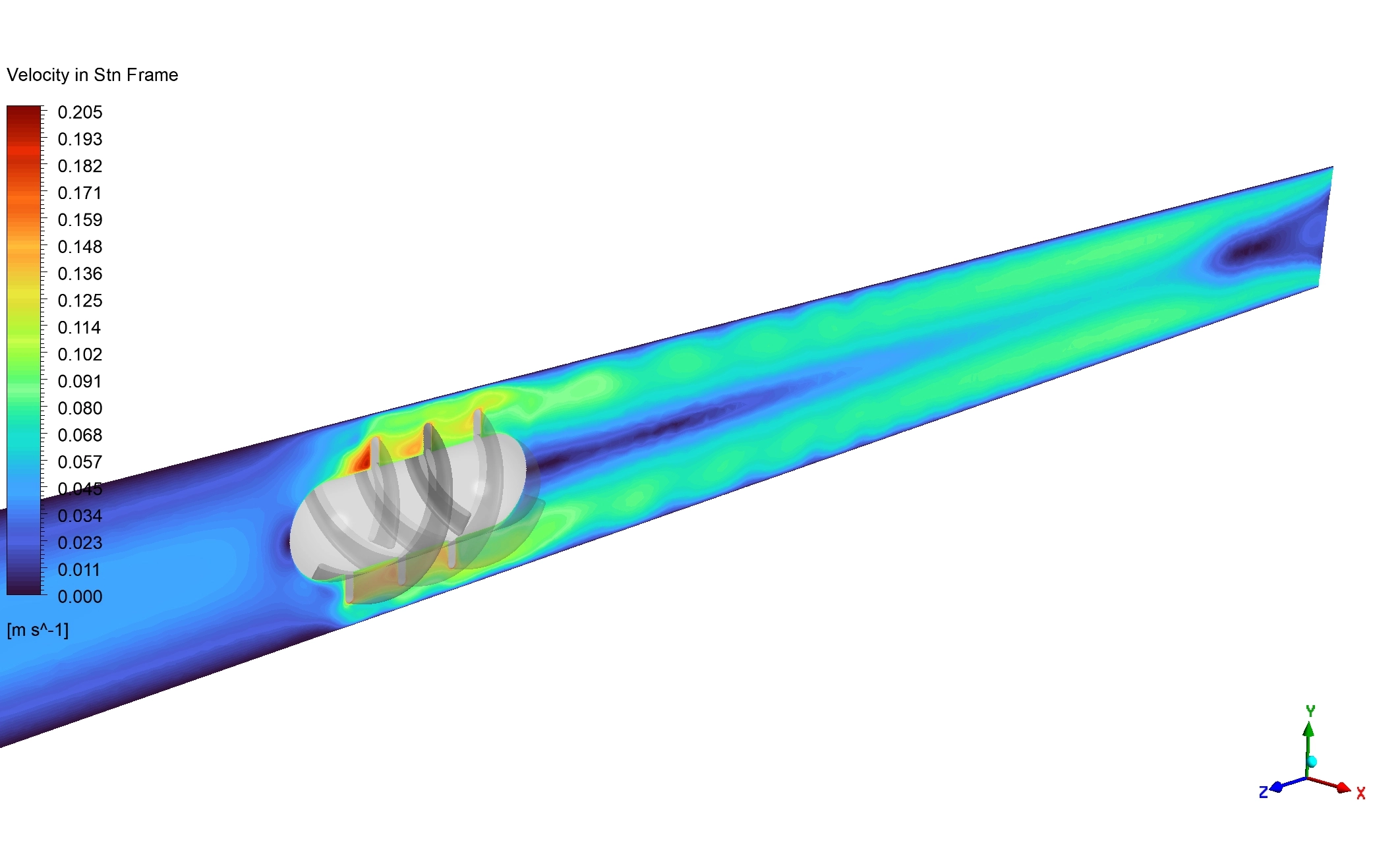
Let us carefully analyze the exact velocity contours and streamline visuals to completely understand the swimming performance of the machine. First, we evaluate the Velocity in Stationary Frame contour. The visual colors clearly show that the highest fluid speed happens exactly at the sharp outer tips of the rotating helical fins, hitting a red maximum peak of 0.205 m/s. However, far away from the capsule, the fluid quickly drops to a dark blue color, meaning almost zero speed. This is a massive engineering achievement. It mathematically proves the 191 RPM spinning motion safely transfers energy only right next to the robot. Therefore, the spinning machine will not dangerously shake or damage the delicate biological walls of the human body.
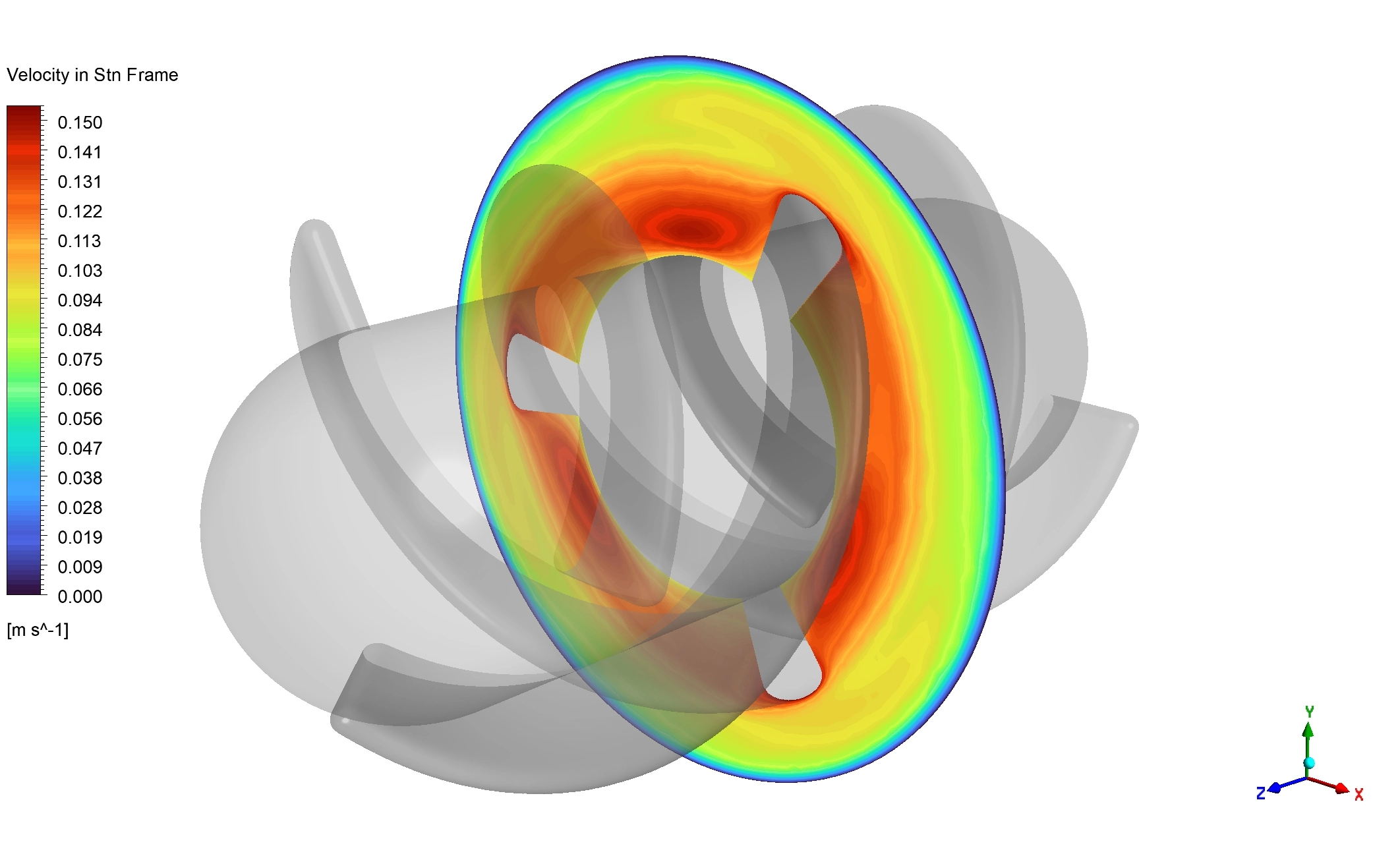
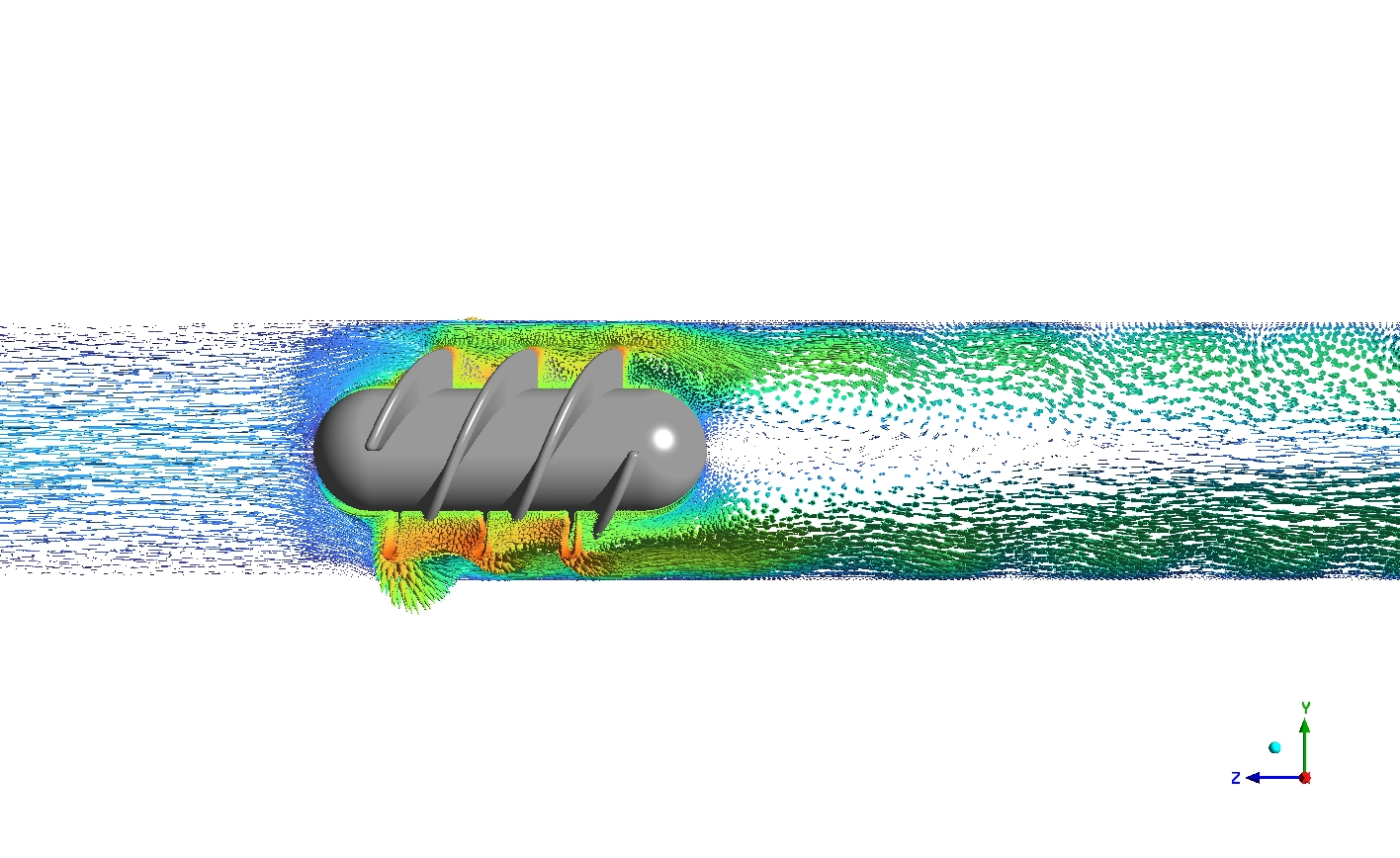
Next, we study the Cross-sectional Velocity contour and the detailed Velocity Vectors. The cross-section slice shows a perfect bright ring of fast 0.150 m/s flow circling the outer fins, while the center capsule body remains totally dark blue. Furthermore, the velocity vectors prove that the natural upstream biological fluid slowly approaches the robot at exactly 0.01 m/s. When this slow fluid hits the spinning fins, it accelerates violently from 0.01 m/s to a maximum of 0.205 m/s and shoots backward. Because the liquid is thrown backward so strongly, the laws of physics guarantee the robot is pushed powerfully forward. Behind the robot, the heavy wake settles down to a steady 0.05 to 0.08 m/s swirling flow.
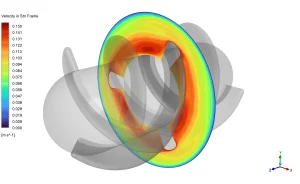
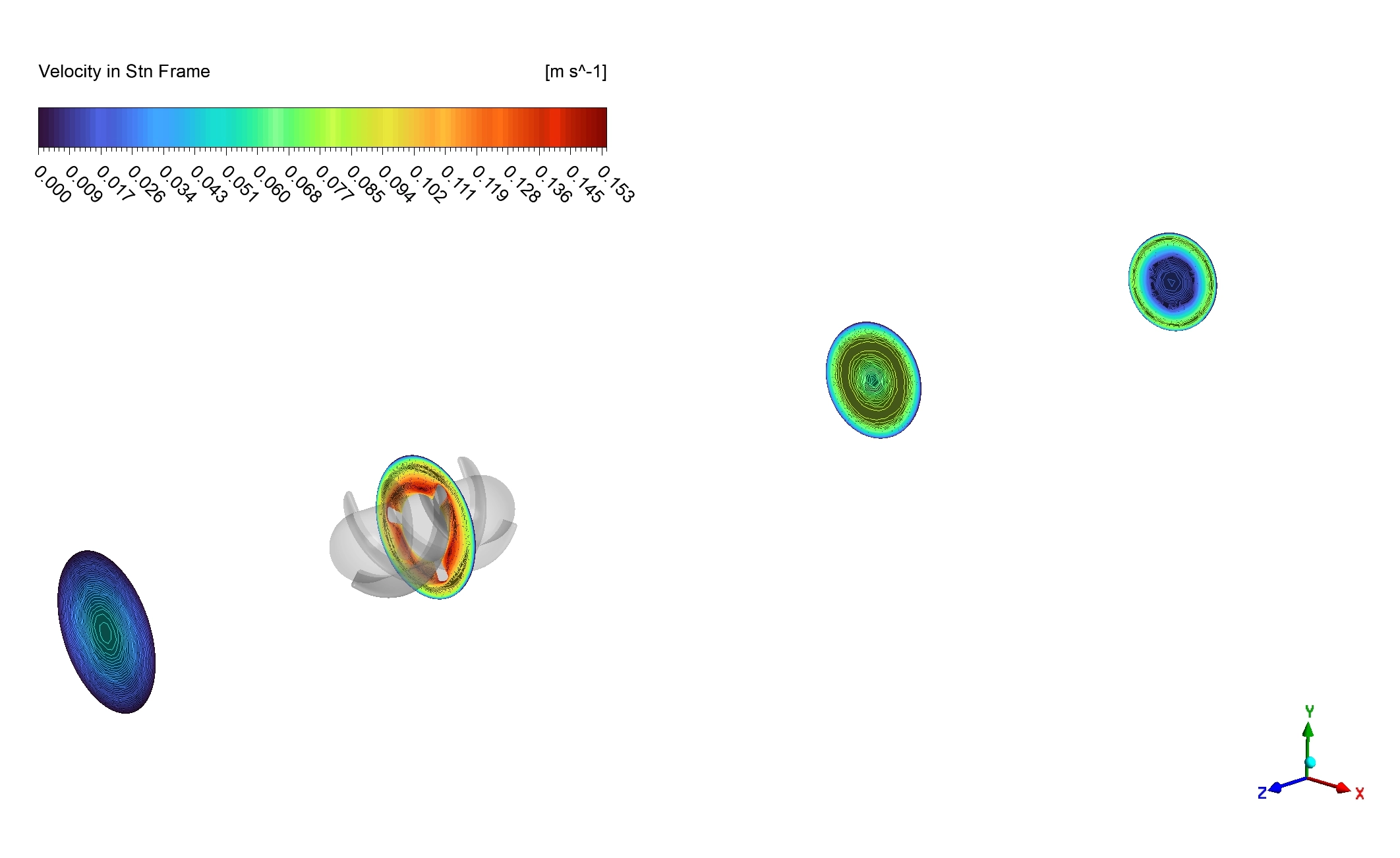
Figure 3: Cross-sectional Velocity in Stationary Frame (0 to 0.150 m/s), highlighting the fast red ring at the fin tips and the slow dark center.
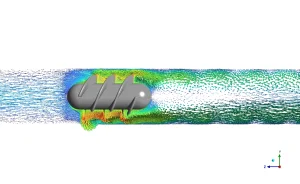
Figure 4: Velocity vectors around the capsule from Fluent CFD, visualizing the slow 0.01 m/s fluid hitting the fins and violently accelerating backward.
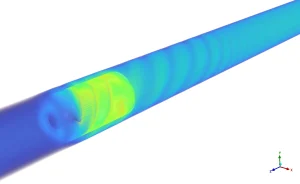
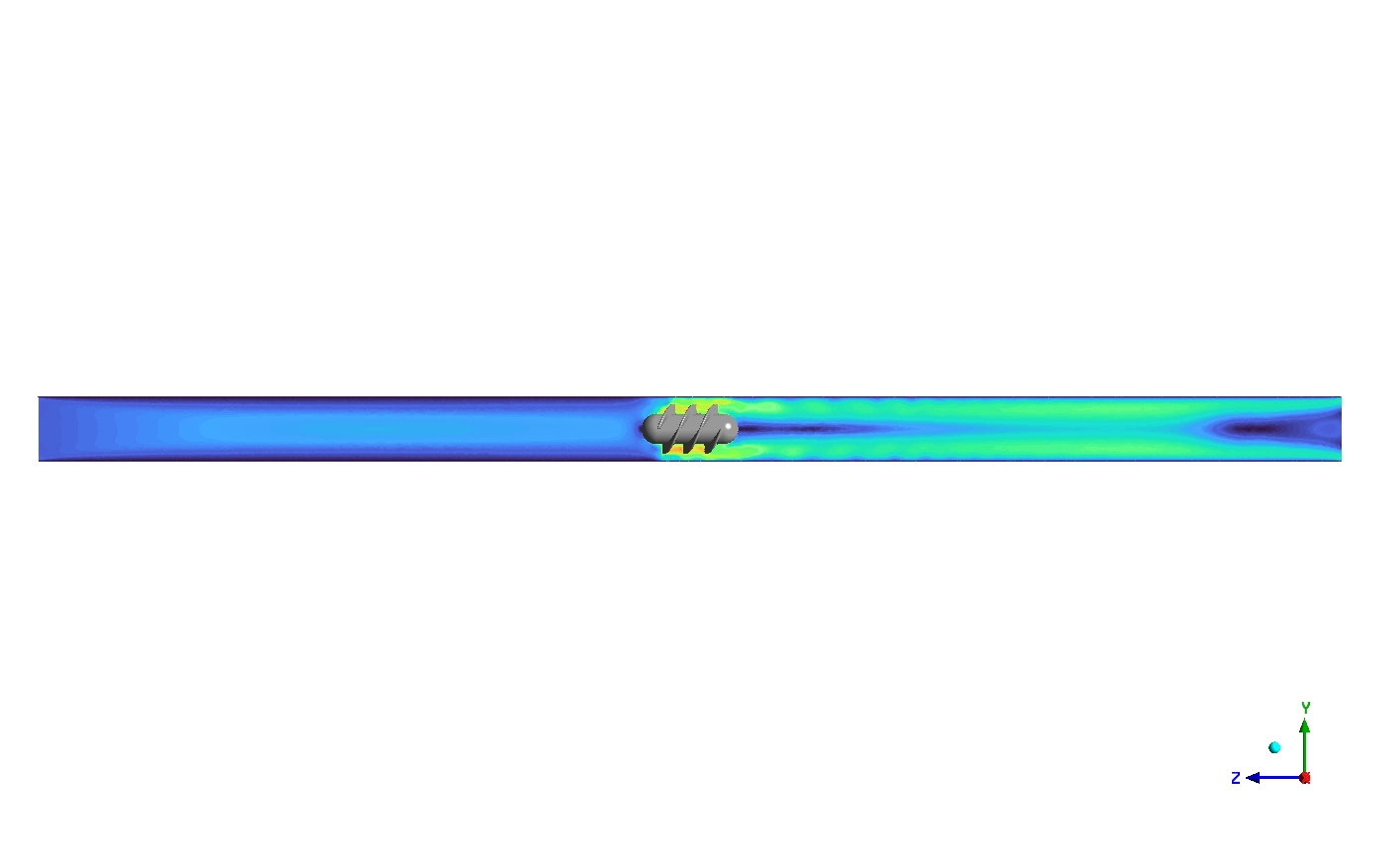
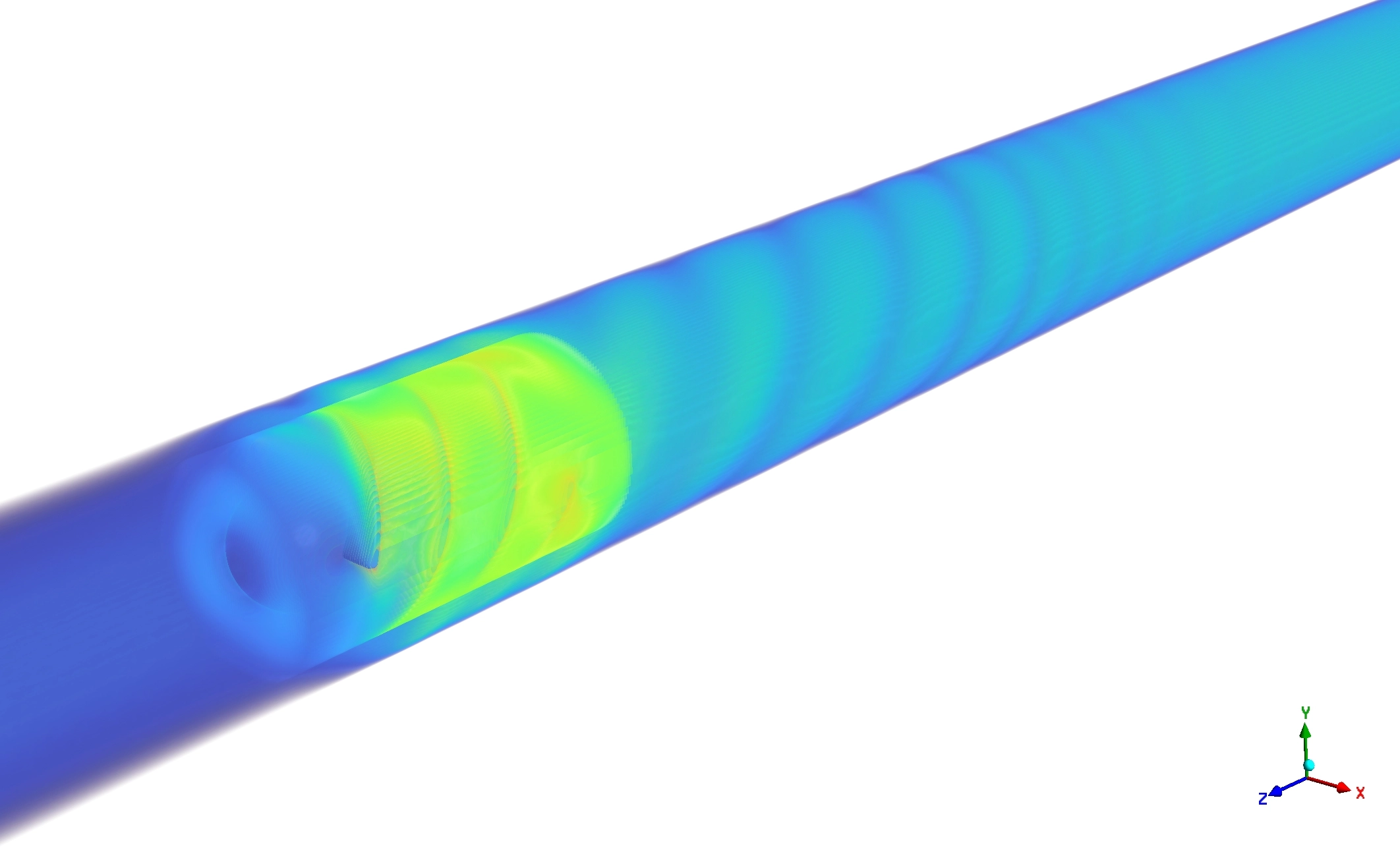
Figure 5: Volume-rendered velocity distribution inside the biological tube, providing a full 3D view of the localized high-speed fluid power.
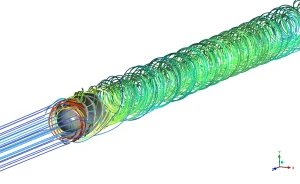
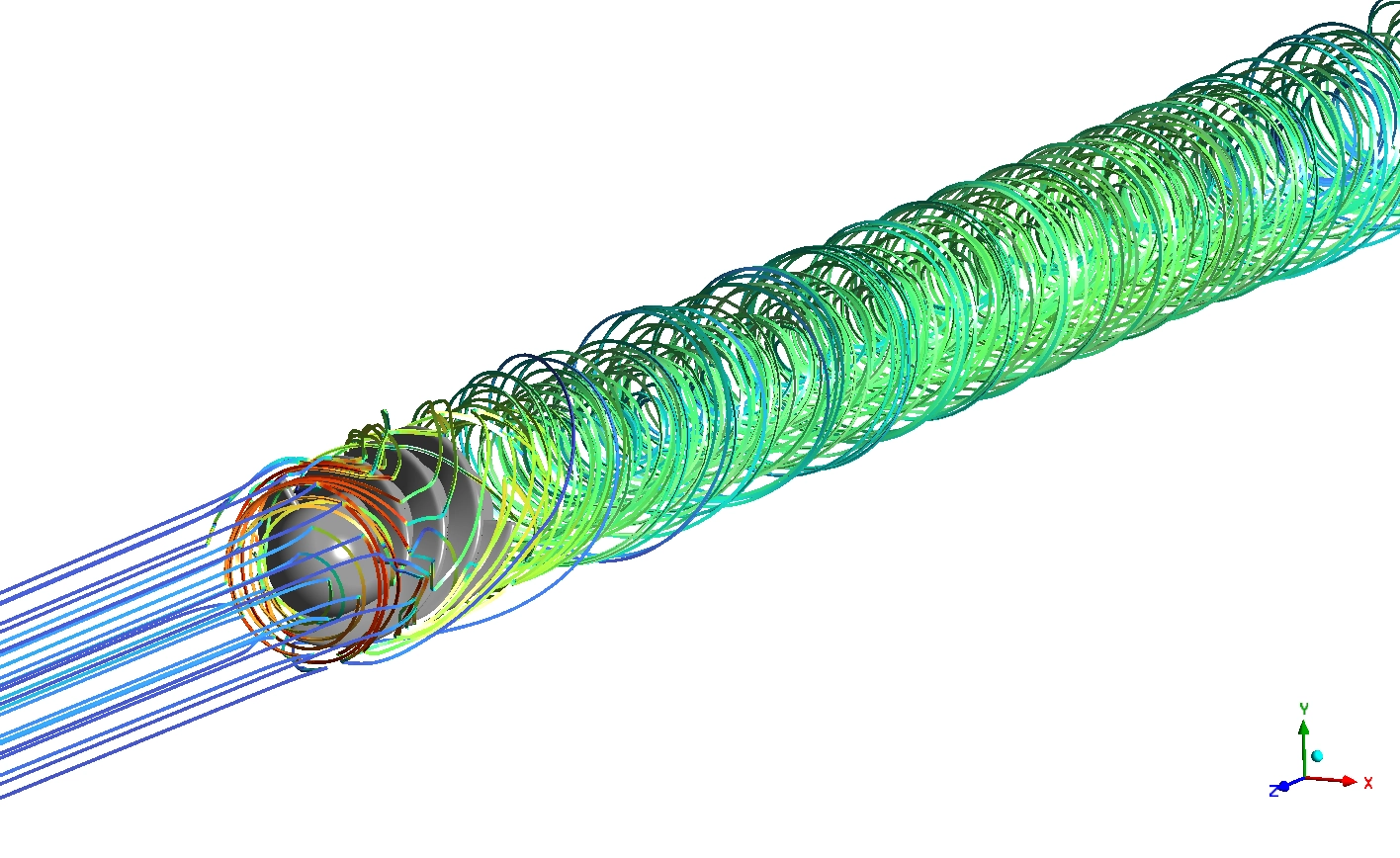
Figure 6: Streamlines from the ANSYS Fluent CFD simulation, proving how straight blue upstream lines transform into tight green helical spirals downstream.
Finally, we look at the Streamlines to track the final travel path of the fluid. The visual blue lines enter the biological tube perfectly straight. However, after crossing the rotating fins, the straight lines immediately transform into tight, green helical spirals. This beautiful swirling pattern is the ultimate proof of success. It completely confirms that the specific helical fin design successfully converts circular spinning motor motion into straight, forward axial thrust. By seeing this exact Capsule Microrobot fluent simulation data, medical designers know their machine works perfectly to deliver medicine.
Frequently Asked Questions (FAQ)
- Why is a polyhedral mesh used for this capsule microrobot simulation?
- A polyhedral mesh has cells with many flat faces. This unique shape perfectly wraps around the highly complex, sharp curves of the twisting helical fins. It provides much better mathematical accuracy while using fewer total cells (1,195,057) than a standard mesh.
- What is the MRF method in ANSYS Fluent?
- The Moving Reference Frame (MRF) method is a smart mathematical tool. Instead of physically moving the heavy mesh in the software, MRF keeps the mesh stationary but adds rotational physics to the fluid. This saves computers a massive amount of calculation time.
- Why does the fluid reach 0.205 m/s only at the fin tips?
- As the fins spin at exactly 191 RPM, their sharp outer edges travel through the water much faster than the center body. This fast motion grabs the slow 0.01 m/s fluid and aggressively throws it backward at 0.205 m/s, which creates the physical thrust to push the robot forward.







Reviews
There are no reviews yet.